| ZPĚT |
|
Dva roboti na slunce
Build a.. nebo
Build your.. – tak začínají konstrukční články v amerických
časopisech. V zemi kde lze ze spotřební elektroniky koupit na
co si jen vzpomenete, se konstrukce elektronických zařízení
stává skutečným hobby. Elektronická zařízení si amatéři
vyrábějí hlavně proto, že je to baví, a nikoliv proto, že
tím ušetří nějaký ten $. Proto i konstrukce v těchto časopisech
mají poněkud jinou skladbu, než konstrukce v našich časopisech.
 Konstrukce robotů a různých „pohybovadel“ je
činností téměř modelářská. Ve Spojených státech si s nimi
můžete i zasoutěžit, podrobnosti jsou na http://sst.lanl.gov/robot
.Soutěžit lze v několika kategoriích, z nichž je
kategorie vozítek na solární pohon „solarroller“ tou
nejjednodušší. Tyto vozítka nesmí být podle propozic větší
než 6 kubických palců a maximální rozměry fotovoltaického
článku nesmí být větší než 0,5 × 2,5 palce. Měří se
čas, za který robot překoná vzdálenost jednoho metru na dráze
široké 6 palců. K pohonu je použito buď přímé sluneční
světlo nebo světlo 500 W halogenové lampy.
Konstrukce robotů a různých „pohybovadel“ je
činností téměř modelářská. Ve Spojených státech si s nimi
můžete i zasoutěžit, podrobnosti jsou na http://sst.lanl.gov/robot
.Soutěžit lze v několika kategoriích, z nichž je
kategorie vozítek na solární pohon „solarroller“ tou
nejjednodušší. Tyto vozítka nesmí být podle propozic větší
než 6 kubických palců a maximální rozměry fotovoltaického
článku nesmí být větší než 0,5 × 2,5 palce. Měří se
čas, za který robot překoná vzdálenost jednoho metru na dráze
široké 6 palců. K pohonu je použito buď přímé sluneční
světlo nebo světlo 500 W halogenové lampy.
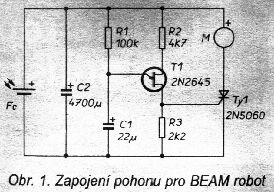
Z propozic soutěže je zřejmé, že tak malý solární článek
nedá dostatek energie k přímému napájení motoru. Energie
se proto nejdříve akumuluje v kondenzátoru C2 – viz obr. 1.
Současně se také přes rezistor R1 nabíjí kondenzátor C1.
Dosáhne-li napětí na C2 asi 2V, překlopí se tranzistor UJT T1
a nábojem kondenzátoru C1 se sepne tyristor. Kondenzátor C2 se
vybije do motoru, vozítko přískokem popojede a celý cyklus začne
znova. Je třeba použít motor s velkou účinností, výborně
vyhoví motor z walkmana. Oskenovaná fotografie vozítka je na
obr. 3.
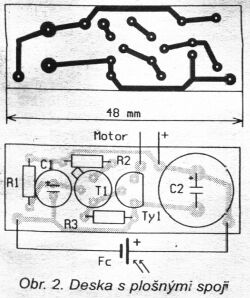
Pokud by jste si chtěl zaexperimentovat, můžete použít desku
s plošnými spoji podle obr.2. Tranzistor UJT lze objednat například
u firmy Kerr Elektronik (tel.: 0439/811363). Ostatní součástky
jsou běžné a jako tyristor můžete použít například KT501.
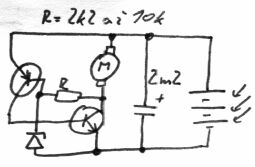 |
Na dalším obrázku je schéma zapojení podobného robota, s tím rozdílem, že se zde používají místo jednoho speciálního dva obyčejné tranzistory. Mohou se použít například byčejné tranzistory BC338 a BC238. Toto zapojení jsem našel na výše uvedených stránkách o závodech podobných robotů. |
Zdeněk Novotný